项目一:变截面垂直管道机器人
项目简介:
合作方式:合作开拓应用领域并进行产业化开发
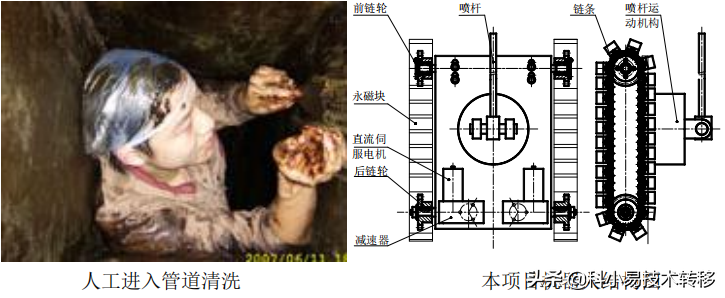
项目二、油烟管道清洗机器人
项目简介:
油烟管道长期得不到清洗,油渍残留在油烟机和油烟管道上,时间久了形成油垢,油垢越厚就越难清洗,不仅影响到油烟机和油烟管道的使用,缩短设备的使用寿命,增加运营成本,同时造成污染,形成安全隐患。传统的清洗只能由身材瘦小的工人爬进烟道进行,空间狭窄的工作环境和无法进入的垂直烟道造成了清洗困难,有时甚至根本无法进行清洗。针对油烟管道机器人工作环境,开发设计了一种专用于油烟管道内壁清洗的机器人,该机器人采用磁吸附履带行走机构,能在水平管道也能在垂直管道进行清洗作业,该机器人采用等靶距、等水射流冲击角控制高压水射流清洗工艺技术,较现有油烟管道清洗机器人产品提高了清洗质量和清洗效率。合作方式:合作开拓应用领域并进行产业化开发。

项目三、电脑横机花型准备系统非规整几何图纹的生成与控制
项目简介:
本项目结合模糊逻辑、遗传算法、元胞自动机、神经网络等人工智能手段,利用计算机图形学方法,研究混沌、分形等计算机可视化图纹——非规整几何图纹的生成与控制,并将研究成果应用于大型电脑针织横机及其花型准备系统上。
主要成果如下:
1.非规整几何图纹的模糊分形分析:运用模糊自相似分析理论,分析非规整几何图纹的特性与归类;
2.非规整几何目标图纹的刻画:从理论上探索李雅普诺夫指教、关键数之外的刻画混沌、分形图纹的参量,为控制非规整几何图纹的生成提供前提和基础;
3.基于遗传算法和优生遗传算法的非规整几何图纹的生成与控制:包括控制非混沌系统转变为混沌系统和奇异吸引子图纹生成的系统结构、方法,以及加快吸引子生成速度的改进策略;
4.基于元胞自动机和模糊元胞自动机的非规整几何图纹的生成与控制:结构与规则;
5.基于(递归)神经网络的混沌图纹的生成与控制:条件、机理和判据;
6.非规整几何图纹的可视化的新方法:探索RGB对二维、三维或高维系统的不同配色方法;
7.非规整几何图纹的针织花板设计与编织。
经国际联机检索科技查新,本项目研究成果达到国内领先、国际先进水平。
项目四、具有0.1μm进给精度的超精密外圆磨床
项目简介:
MK1320B是具有带有超精密进给工作台的超精密外圆磨床。具有前馈补偿的闭环复合控制功能,实现了复杂工况下的超精密稳定进给和动态补偿;研制的微进给工作台使精密磨床的最小进给量从原来的0.5μm精确到0.1±0.02μm,由此可使磨床加工精度提高1-2级,可使批量生产时的加工一致性提高1-2级或以上。
本产品已进行了大量的连续、批量零件的精密加工与测试。
项目五、地毯簇绒机
项目简介:
DHT-200型地毯簇绒机是大型纺织类装备,其主轴系统属超长主轴,双端变频调速驱动;采用多组多连杆同步机构,驱动簇绒针和成圈钩往复运动、精确协同,将绒纱植入底布并成圈,通过提花控制系统精确给定喂纱量,精确控制纱线张力,实现成圈的大小(或高低);采用横动机构驱动针床平移,实现纱线交错和花纹变化,织造多种立体图案和花纹的地毯。DHT-200型地毯簇绒机已达到了国外同类机型的各项技术指标,江西省科技厅组织的专家鉴定为达到国内领先和国际先进的水平。价格约是进口同类产品的1/3。DHT-200型地毯簇绒机的成功研制,填补了我国地毯装备业的空白。
项目六、全自动洗盘机
项目简介:
全自动洗盘机是一种用于中、小型企业或学校食堂用的自动清洗不锈钢餐盘设备(也可清洗碗筷勺)。该设备自动化程度高,有预洗、冲洗、漂洗、烘干、自动摆放功能,仅需人工将10多个餐盘放入预洗框内,机器即可自动完成所有功能,清洗速度180~220盘/小时,适用于150~250人分批进餐的食堂,可减少人工的使用,提高餐盘卫生质量。设备体积小占用面积少:长1700mm×宽650mm×高1600mm。
合作方式:提供设计图纸资料,合作生产。











